新基建|无人值守自动停机坪系统(2)
2020-07-06 17:55 柴火创客空间
3)外环境感知系统
环境监测传感器:风速、风向、雨淋、温度、湿度、光照。外置摄像头:用来监控停机坪外部结构、环境、飞机起降情况等。应急灯:可以通过后台软件打开或者关闭,用来做夜间维护、防盗、应急照明等。天线:无人机于停机坪通讯用。

4)后台控制中心
后台控制中心通过阿里云与停机坪、无人机进行通讯,可以实时收到无人机通过4G网络回传的图像和状态数据,也可以收到停机坪通过光纤传输的3路视频信号和传感器数据;后台控制中心可以远程发送指令给停机坪,操作其打开或关闭舱门,升起或降下升降台,命令机械性更换电池,辅助无人机等。也可以远程控制无人机自动起飞,自动降落,规划航线,执行航线, 调整云台,拍照录像,精准降落等。

此外,后台控制中心可以接麦克风和操作摇杆远程对无人机进行实时控制和远程喊话。

02
系统工作原理
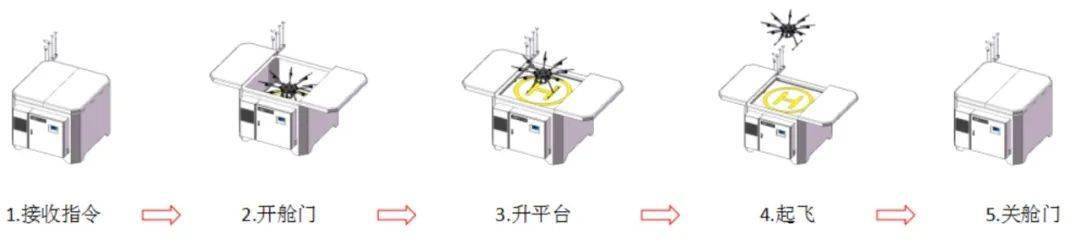
起飞流程
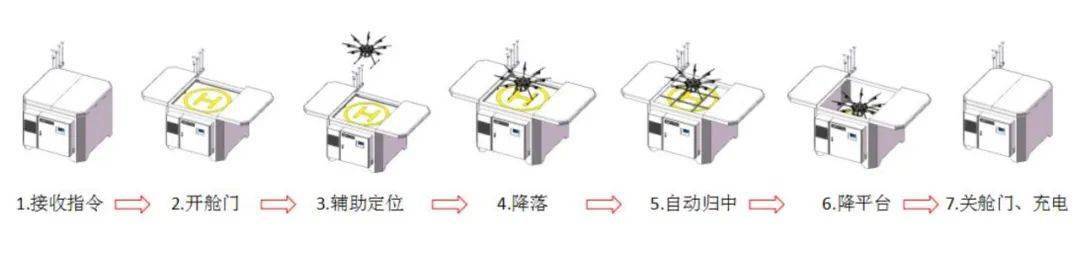
降落流程
精准降落
无人值守自动停机坪系统中,飞机的起降平台仅有 0.7*0.7m 大小,如何确保飞机每次都能精准的降落在上面,这是成败的关键。目前采用的是RTK 精准定位+视觉引导的方案。 RTK技术和视觉引导技术相互配合,RTK 起到大范围引导飞机的作用,视觉起到小范围精准引导的作用。若环境光线不佳,视觉引导无法发挥作用,则全部由 RTK 引导完成;若环境电磁干扰严重,RTK 精度无法保障,则全部由视觉引导完成;
RTK由地面基准站和机载接收模块组成;基准站接收到的卫星信号通过无线通信网实时发给无人机;机载接收机将接收到的卫星信号和收到基准站信号实时联合解算,求得基准站和无人机间坐标增量(基线向量)。站间距 30公里以内,平面精度可以控制在 1-2 厘米。
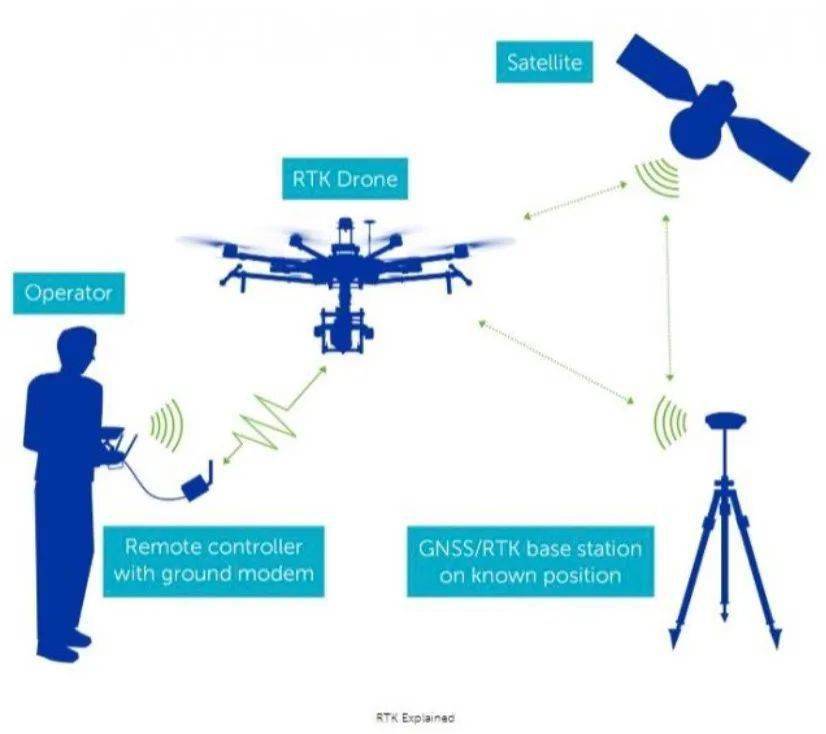
RTK定位

官方微信公众号:掌酷门户(wapzknet)
相关资讯
新闻热点
精选美图
 冀公网安备 13092302000152号
冀公网安备 13092302000152号