视觉引导
复合通讯
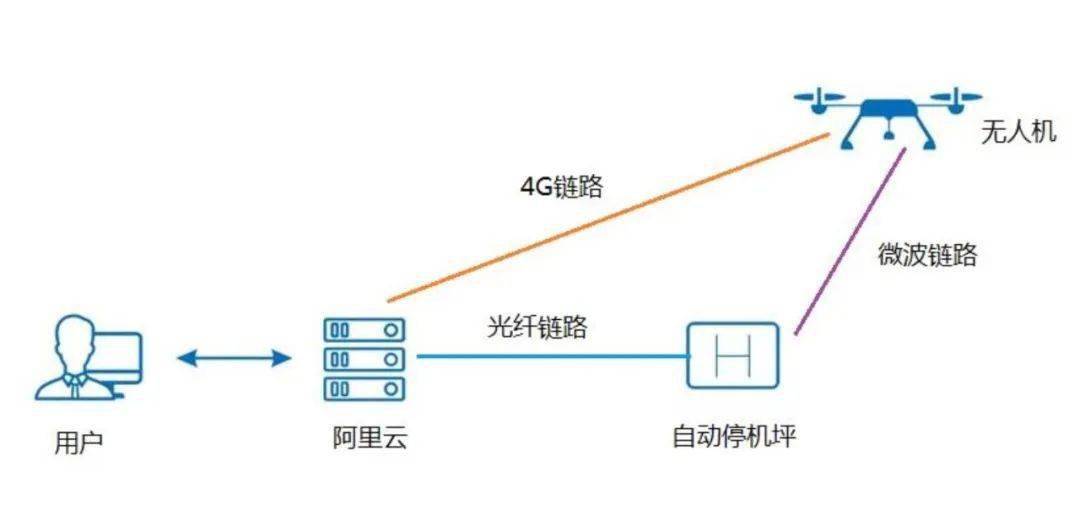
停机坪系统需要依靠通讯来保障运行,后台控制软件运行在阿里云上,停机坪通过光纤接入阿里云,承担高速的宽度通讯,无人机通过 4G 网络接入云后台,因此用户可以远程直接操控无人机;同时无人机与停机坪通过微波通讯,精准降落环节,需要依靠微波链路来引导控制无人机,此外微波链路也充当无人机控制的备用链路,当4G网络无信号时,无人机就自动切换到微波链路,把数据发送至停机坪,停机坪则通过光纤转发至云后台,停机坪充当通讯中继。
03
应用场景(电力巡检)
1、生成航线
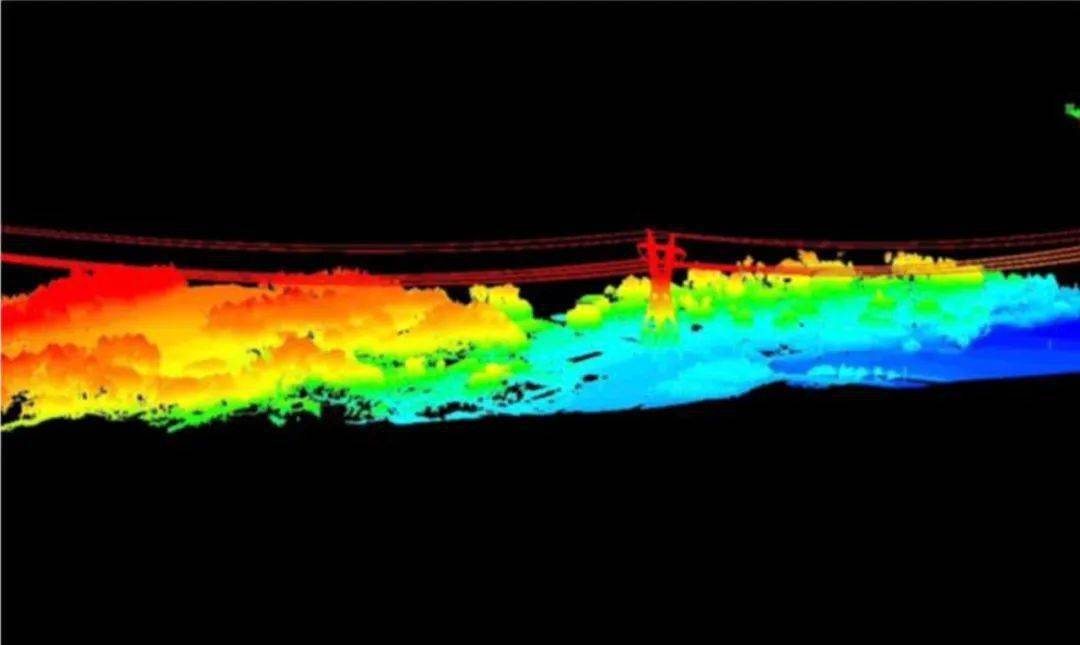
激光雷达在电力行业的应用越来越广泛,通过 360 度,30 万点/秒的密集扫描,再结合高精度的 RTK 技术,可以获取高精度电力线、电力塔及地物环境三维点云数据。
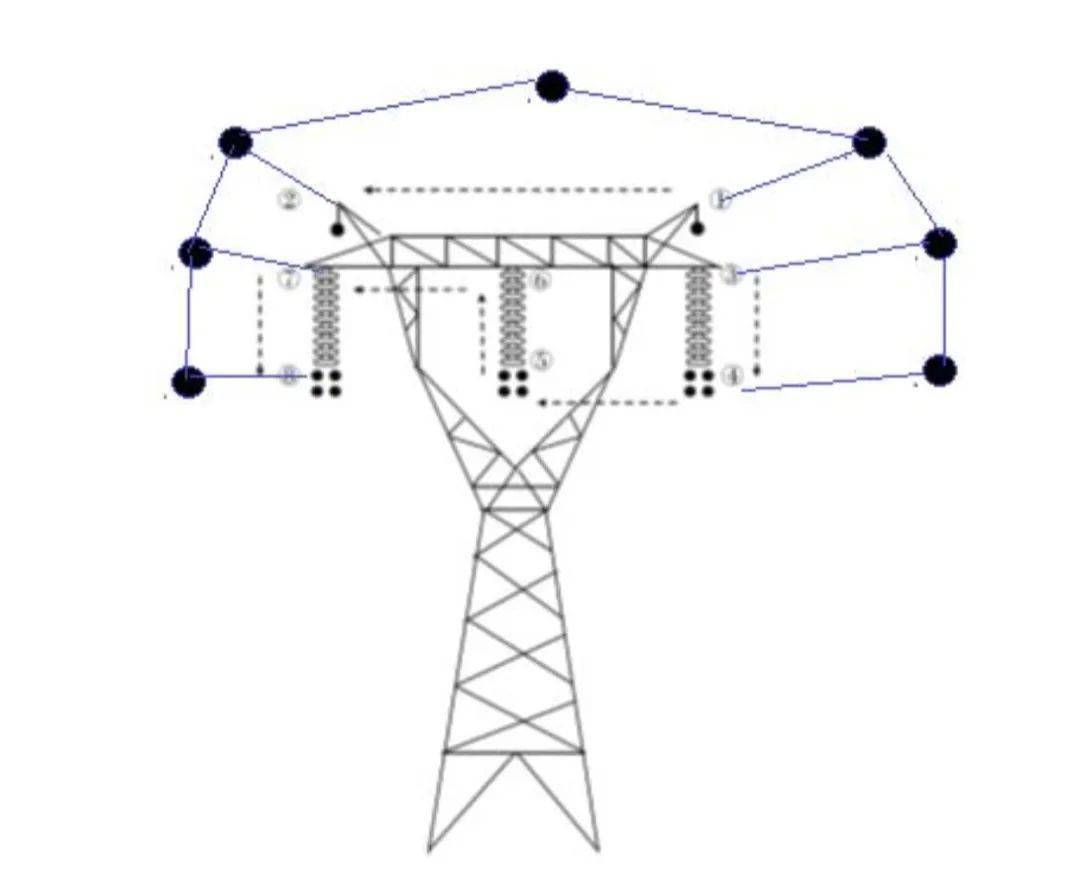
根据点云自动化分类结果,可以区分杆塔上关键部件和杆塔塔型,用塔型和杆塔库中标准杆塔进行比对,可以推算出杆塔各部位的精确空间位置。根据精细化巡检规范要求,计算各挂点空间精确位置和拍摄角度,各挂点之间连线形成航线。
2、远程控制
停机坪的整个收纳和释放飞机的过程,是一套自动化系统,系统本身具备自动协调能力和保护功能。从点云模型之中提取坐标规划航线之后就可以把航点坐标导入后台控制软件;后台控制软件根据坐标寻找就近的停机坪,通知其做好起飞准备;停机坪收到指令后,就启动机械手更换电池, 开启无人机,打开舱门,升起起降台,所有操作自动完成;后台控制软件把任务航线发送到停机坪的无人机上,无人机就自动起飞,开始作业。
作业完成之后,无人机自动返航;飞行到停机坪上空时,视觉自动锁定飞机,引导它精准降落在起降台上;无人机扶正机构把无人机固定在正确的位置上,起降台自动下降;然后机械手启动,把电池取下,自动安装到充电器上去充电。整个过程都是通过网络远程控制,并实时有视频和数据传回。
3、巡检作业和部署
自动停机坪理想的部署位置是在变电站附件,因为有 220V 电源和光纤接入。收到指令后就开始释放无人机作业,一个杆塔巡完飞往另外一个杆塔。 无人机续航时间保守估计25分钟,按平均速度 5m/s 计算飞行距离是7.5km,扣除悬停拍照和精准降落的耗时,一个停机坪是可以覆盖半径 3km的周边。
 冀公网安备 13092302000152号
冀公网安备 13092302000152号